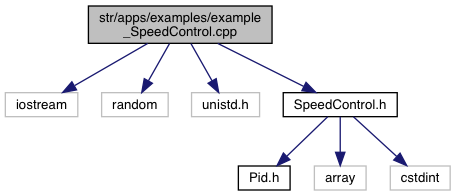
example_SpeedControl.cpp の依存先関係図:
関数 | |
| void | calcVirtualWheels () |
| int | main () |
変数 | |
| int | speed100ms |
| int | value |
| int | right_motor |
| int | left_motor |
関数詳解
◆ calcVirtualWheels()
| void calcVirtualWheels | ( | ) |

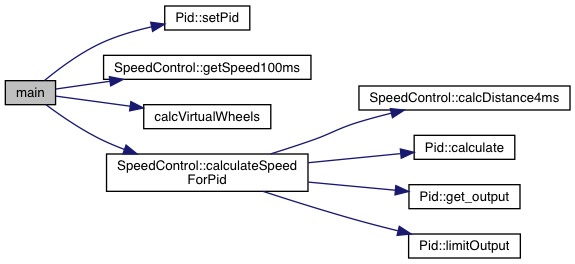
◆ main()
| int main | ( | ) |
1.コンストラクタを作成する
2.PIDパラメータの設定する 今回は以下のようにしています Kp = 2.0 Ki = 2.0 Kd = 0.024 目標値 = 70.0
3.PID計算をする
example_SpeedControl.cpp の 23 行目に定義があります。
呼び出し関係図:
変数詳解
◆ left_motor
| int left_motor |
example_SpeedControl.cpp の 18 行目に定義があります。
◆ right_motor
| int right_motor |
example_SpeedControl.cpp の 18 行目に定義があります。
◆ speed100ms
| int speed100ms |
example_SpeedControl.cpp このプログラムはSpeedControlクラスを使う時に参考にできる使用例です。
【コンパイル・実行の仕方】 g++-7 -w ../src/Pid.cpp ../src/SpeedControl.cpp example_SpeedControl.cpp -I../include ./a.outインクルード
example_SpeedControl.cpp の 17 行目に定義があります。
◆ value
| int value |
example_SpeedControl.cpp の 17 行目に定義があります。
