#include <Walker.h>
Walker.h の 10 行目に定義があります。
◆ Walker()
◆ angleChange()
| void Walker::angleChange |
( |
int |
angle, |
|
|
int |
rotation |
|
) |
| |
◆ edgeChange()
| int Walker::edgeChange |
( |
| ) |
|
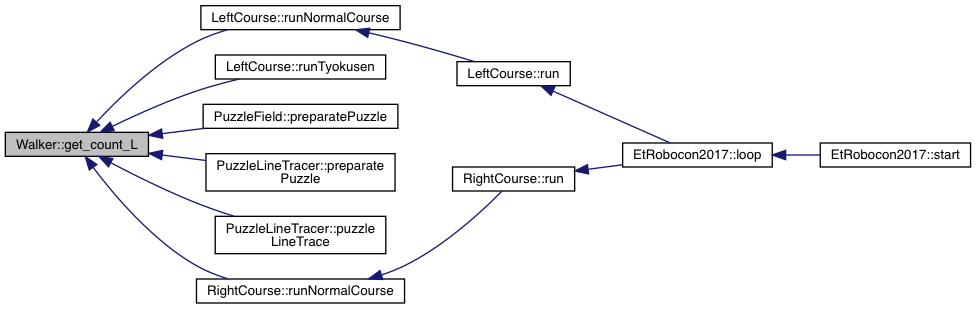
◆ get_count_L()
| int32_t Walker::get_count_L |
( |
| ) |
|
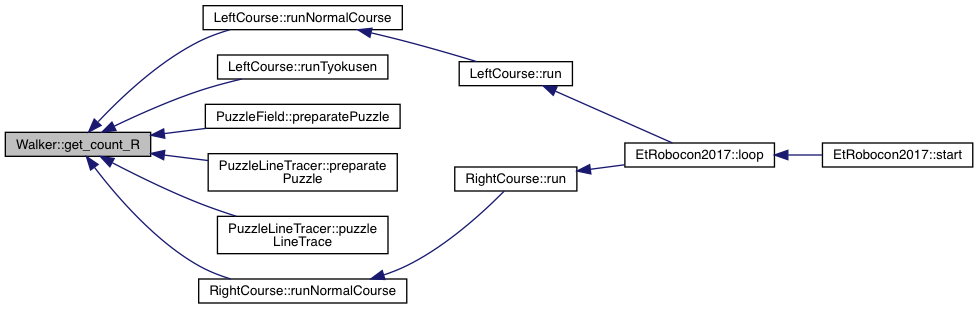
◆ get_count_R()
| int32_t Walker::get_count_R |
( |
| ) |
|
◆ init()
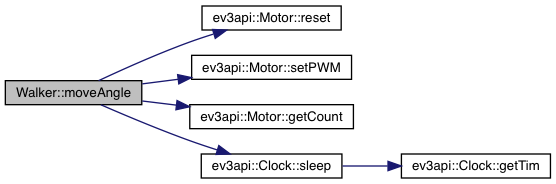
◆ moveAngle()
| void Walker::moveAngle |
( |
int8_t |
pwm, |
|
|
int |
angle |
|
) |
| |
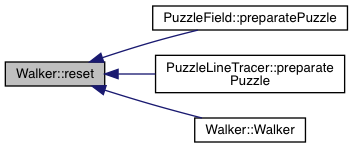
◆ reset()
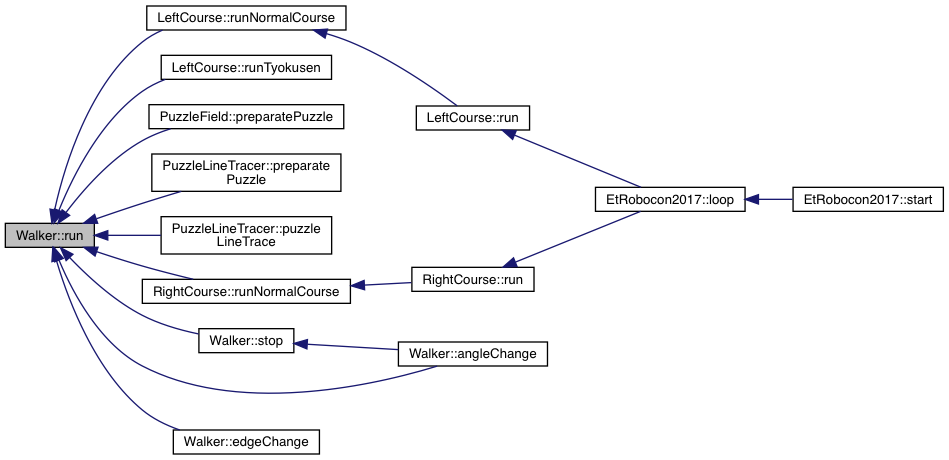
◆ run()
| void Walker::run |
( |
int8_t |
pwm, |
|
|
int8_t |
turn |
|
) |
| |
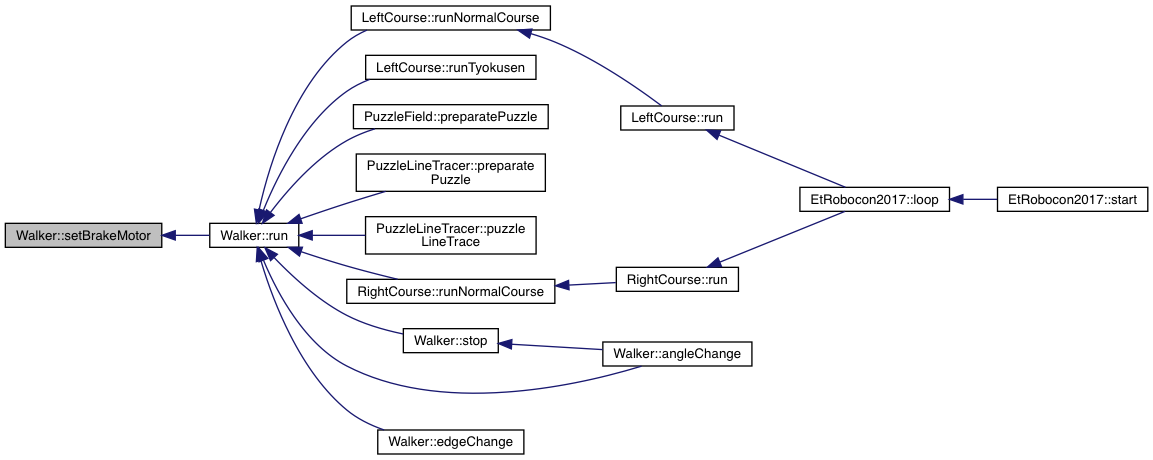
◆ setBrakeMotor()
| void Walker::setBrakeMotor |
( |
bool |
brake | ) |
|
◆ stop()
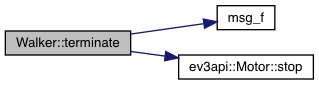
◆ terminate()
| void Walker::terminate |
( |
| ) |
|
このクラス詳解は次のファイルから抽出されました: