#include <Clock.h>
ev3api::Clock 連携図
公開メンバ関数 | |
| Clock (void) | |
| void | reset (void) |
| uint32_t | now (void) const |
| void | wait (uint32_t duration) |
| void | sleep (uint32_t duration) |
静的限定公開メンバ関数 | |
| static uint32_t | getTim () |
詳解
構築子と解体子
◆ Clock()
関数詳解
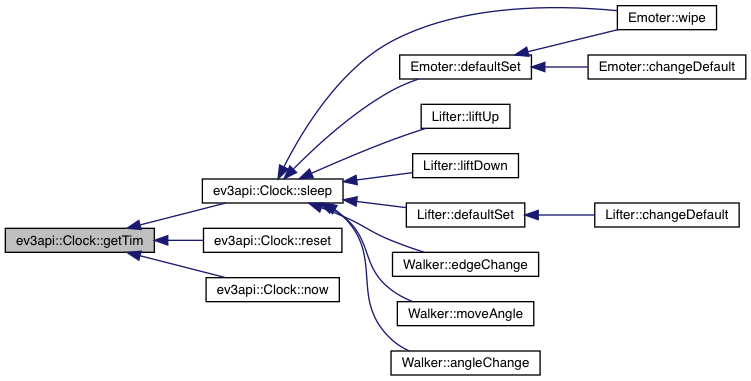
◆ getTim()
|
staticprotected |
◆ now()
| uint32_t Clock::now | ( | void | ) | const |

◆ reset()
| void Clock::reset | ( | void | ) |

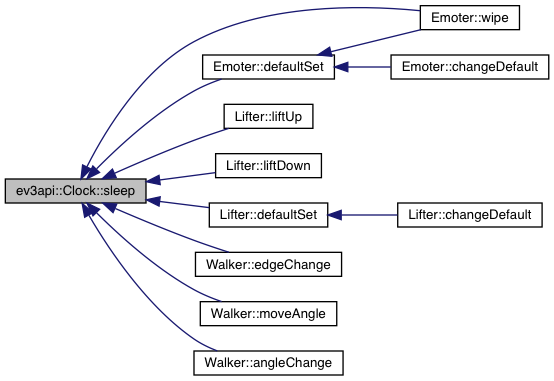
◆ sleep()
|
inline |

◆ wait()
|
inline |
このクラス詳解は次のファイルから抽出されました:
