駐車クラス [詳解]
#include "Parking.h"
Parking 連携図
公開メンバ関数 | |
| void | runParallel () |
| void | runParpendicular () |
| void | waitThreeTimes () |
詳解
関数詳解
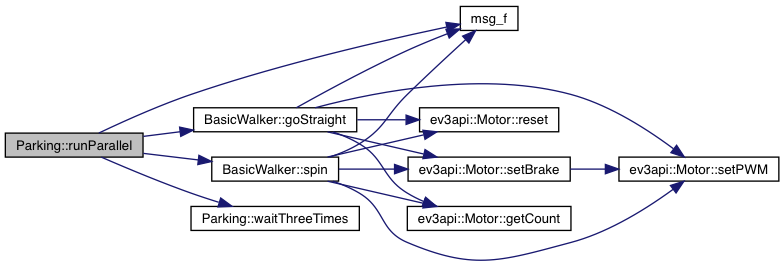
◆ runParallel()
| void Parking::runParallel | ( | ) |
縦列駐車を実行する。 実行開始時にBasicWalkerクラスのインスタンスを生成し、 goStraightメンバ関数とspinメンバ関数に依存する。
Parking.cpp の 9 行目に定義があります。
呼び出し関係図:
被呼び出し関係図:

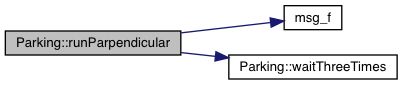
◆ runParpendicular()
| void Parking::runParpendicular | ( | ) |
直角駐車を実行する。 実行開始時にBasicWalkerクラスのインスタンスを生成し、 goStraightメンバ関数とspinメンバ関数に依存する。
Parking.cpp の 23 行目に定義があります。
呼び出し関係図:
◆ waitThreeTimes()
| void Parking::waitThreeTimes | ( | ) |

このクラス詳解は次のファイルから抽出されました:
- str/apps/include/Parking.h
- str/apps/src/Parking.cpp
