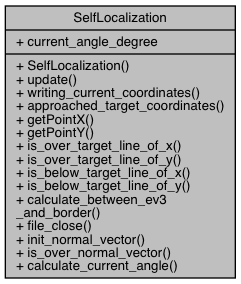
#include <SelfLocalization.h>
|
| | SelfLocalization (std::int32_t left_motor_sl, std::int32_t right_motor_sl, bool save=true) |
| |
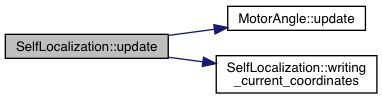
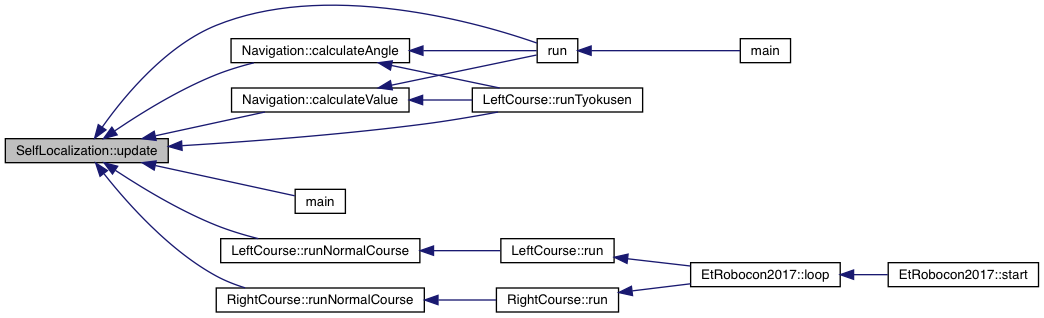
| void | update (std::int32_t left_motor_sl, std::int32_t right_motor_sl) |
| |
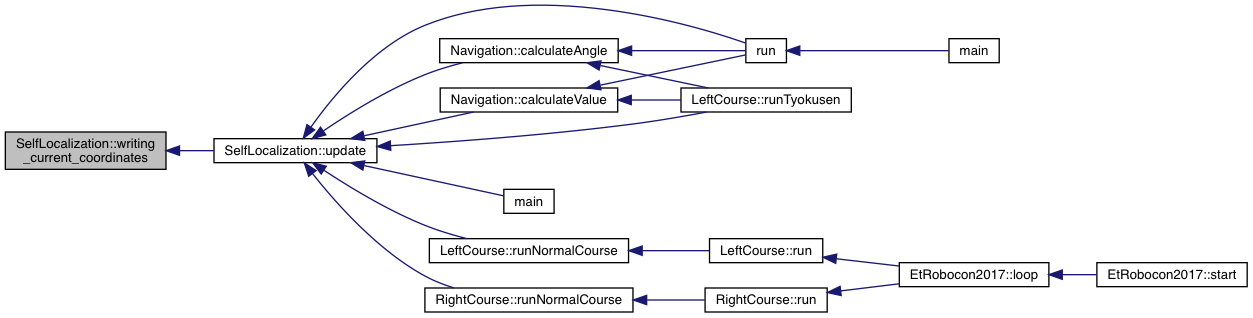
| void | writing_current_coordinates () |
| |
| bool | approached_target_coordinates (float target_x, float target_y, float target_radius) |
| |
| float | getPointX () |
| |
| float | getPointY () |
| |
| bool | is_over_target_line_of_x (float target_x) |
| |
| bool | is_over_target_line_of_y (float target_y) |
| |
| bool | is_below_target_line_of_x (float target_x) |
| |
| bool | is_below_target_line_of_y (float target_y) |
| |
| float | calculate_between_ev3_and_border (float _start_x, float _start_y, float _goal_x, float _goal_y, float _current_x, float _current_y) |
| |
| void | file_close () |
| |
| void | init_normal_vector (float _start_x, float _start_y, float _goal_x, float _goal_y, float _current_x, float _current_y) |
| |
| bool | is_over_normal_vector (float _current_x, float _current_y) |
| |
| void | calculate_current_angle () |
| |
◆ SelfLocalization()
| SelfLocalization::SelfLocalization |
( |
std::int32_t |
left_motor_sl, |
|
|
std::int32_t |
right_motor_sl, |
|
|
bool |
save = true |
|
) |
| |
◆ approached_target_coordinates()
| bool SelfLocalization::approached_target_coordinates |
( |
float |
target_x, |
|
|
float |
target_y, |
|
|
float |
target_radius |
|
) |
| |
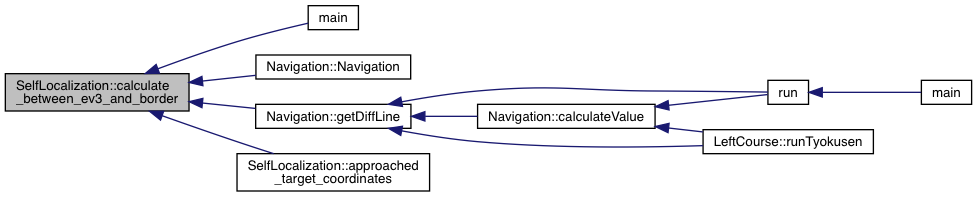
◆ calculate_between_ev3_and_border()
| float SelfLocalization::calculate_between_ev3_and_border |
( |
float |
_start_x, |
|
|
float |
_start_y, |
|
|
float |
_goal_x, |
|
|
float |
_goal_y, |
|
|
float |
_current_x, |
|
|
float |
_current_y |
|
) |
| |
◆ calculate_current_angle()
| void SelfLocalization::calculate_current_angle |
( |
| ) |
|
◆ file_close()
| void SelfLocalization::file_close |
( |
| ) |
|
◆ getPointX()
| float SelfLocalization::getPointX |
( |
| ) |
|
◆ getPointY()
| float SelfLocalization::getPointY |
( |
| ) |
|
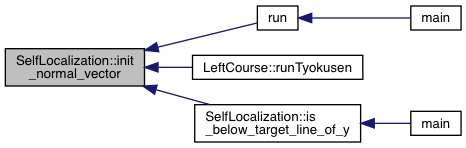
◆ init_normal_vector()
| void SelfLocalization::init_normal_vector |
( |
float |
_start_x, |
|
|
float |
_start_y, |
|
|
float |
_goal_x, |
|
|
float |
_goal_y, |
|
|
float |
_current_x, |
|
|
float |
_current_y |
|
) |
| |
◆ is_below_target_line_of_x()
| bool SelfLocalization::is_below_target_line_of_x |
( |
float |
target_x | ) |
|
◆ is_below_target_line_of_y()
| bool SelfLocalization::is_below_target_line_of_y |
( |
float |
target_y | ) |
|
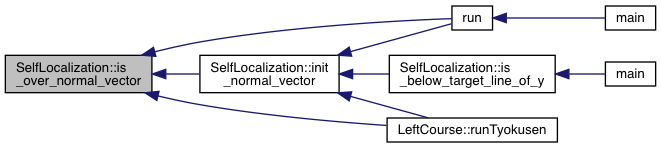
◆ is_over_normal_vector()
| bool SelfLocalization::is_over_normal_vector |
( |
float |
_current_x, |
|
|
float |
_current_y |
|
) |
| |
◆ is_over_target_line_of_x()
| bool SelfLocalization::is_over_target_line_of_x |
( |
float |
target_x | ) |
|
◆ is_over_target_line_of_y()
| bool SelfLocalization::is_over_target_line_of_y |
( |
float |
target_y | ) |
|
◆ update()
| void SelfLocalization::update |
( |
std::int32_t |
left_motor_sl, |
|
|
std::int32_t |
right_motor_sl |
|
) |
| |
◆ writing_current_coordinates()
| void SelfLocalization::writing_current_coordinates |
( |
| ) |
|
◆ current_angle_degree
| int SelfLocalization::current_angle_degree |
このクラス詳解は次のファイルから抽出されました: