#include <Distance.h>
Distance 連携図
公開メンバ関数 | |
| std::int32_t | getDistanceTotal (std::int32_t countL, std::int32_t countR) |
| std::int32_t | getDistanceCurrent (std::int32_t countL, std::int32_t countR) |
| void | resetDistance (int32_t countL, int32_t countR) |
詳解
タイヤの進んだ距離(回転角)に関するクラス
Distance.h の 14 行目に定義があります。
関数詳解
◆ getDistanceCurrent()
| int32_t Distance::getDistanceCurrent | ( | std::int32_t | countL, |
| std::int32_t | countR | ||
| ) |

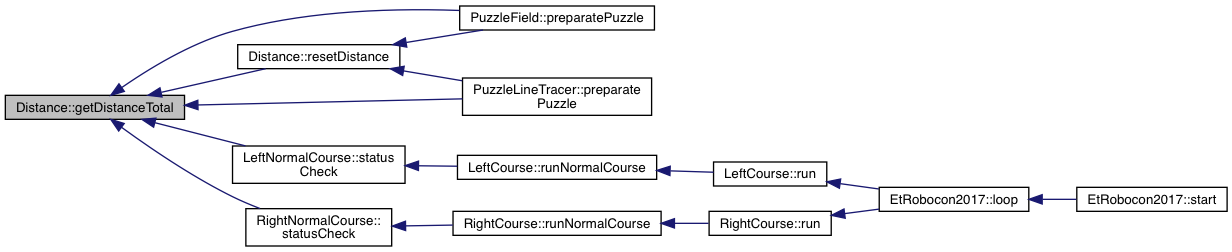
◆ getDistanceTotal()
| int32_t Distance::getDistanceTotal | ( | std::int32_t | countL, |
| std::int32_t | countR | ||
| ) |
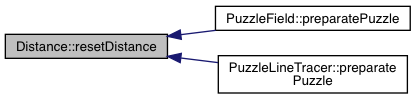
◆ resetDistance()
| void Distance::resetDistance | ( | int32_t | countL, |
| int32_t | countR | ||
| ) |

このクラス詳解は次のファイルから抽出されました:
- str/apps/include/Distance.h
- str/apps/src/Distance.cpp
