#include <LeftCourse.h>
LeftCourse 連携図
公開メンバ関数 | |
| LeftCourse () | |
| void | setFirstCode (int32_t) |
| void | run () |
| void | runNormalCourse () |
| void | runTyokusen (float, float, float, float, bool) |
| void | runBlockRange () |
| void | runParallelParking () |
詳解
Lコースを走らせるときに呼び出されるクラス
LeftCourse.h の 23 行目に定義があります。
構築子と解体子
◆ LeftCourse()
| LeftCourse::LeftCourse | ( | ) |
コンストラクタ。センサ類の初期化を行う
LeftCourse.cpp の 8 行目に定義があります。
関数詳解
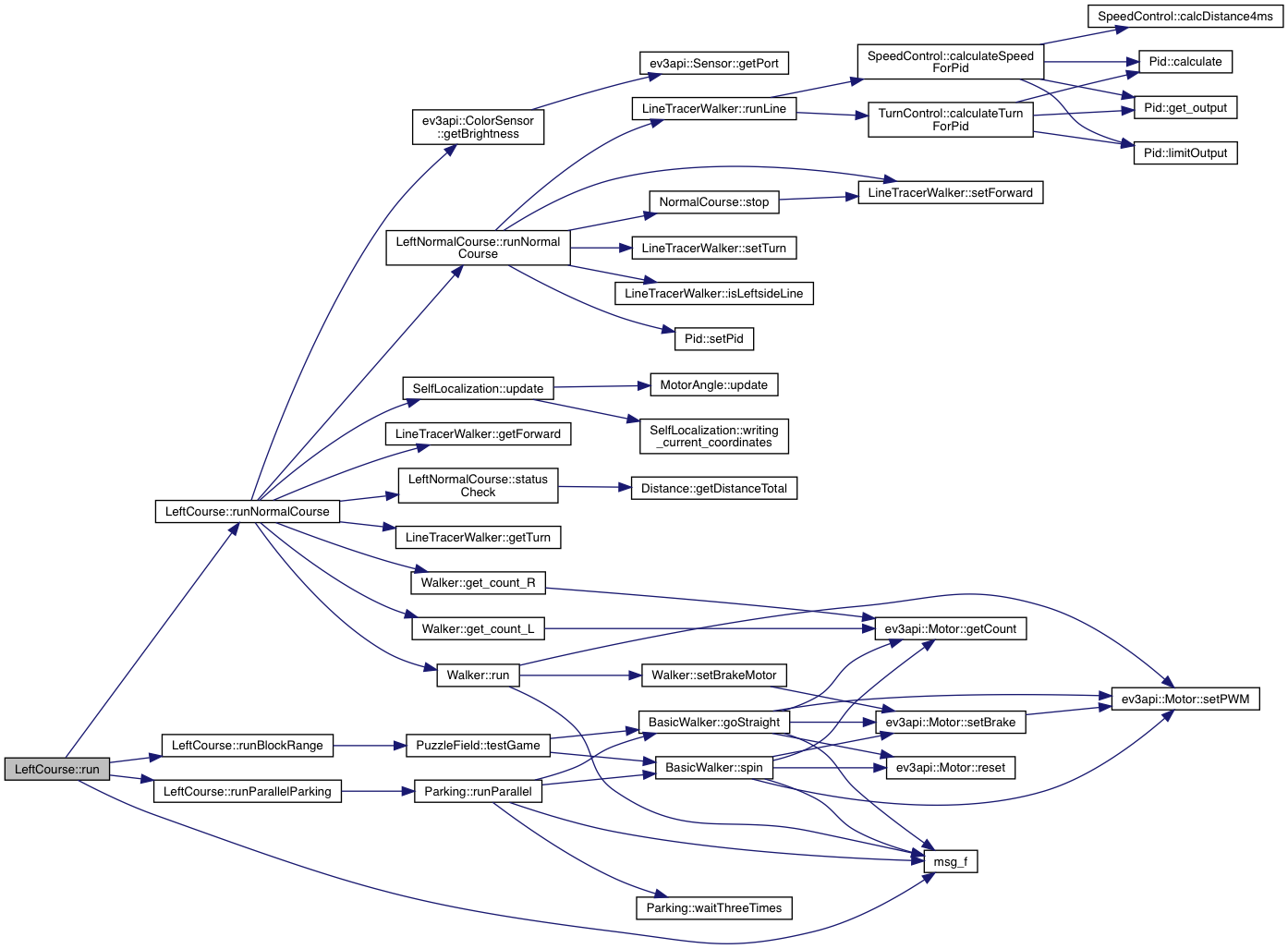
◆ run()
| void LeftCourse::run | ( | ) |

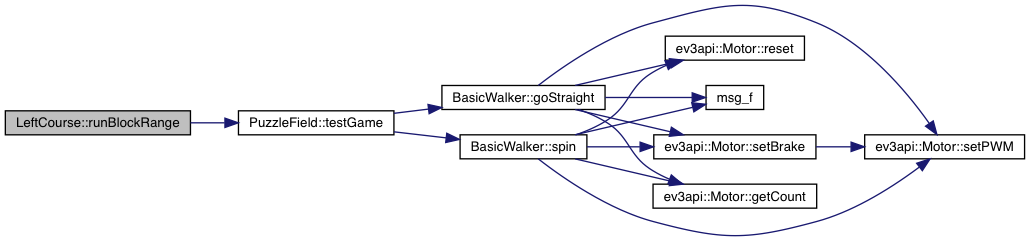
◆ runBlockRange()
| void LeftCourse::runBlockRange | ( | ) |

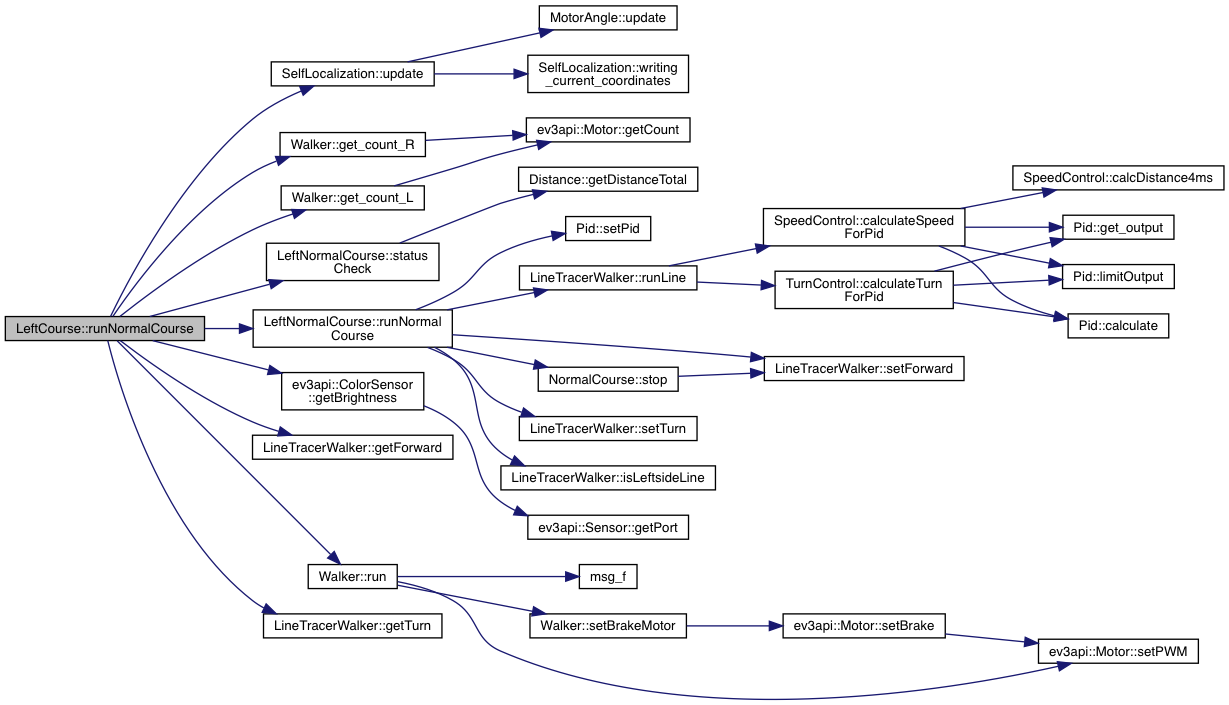
◆ runNormalCourse()
| void LeftCourse::runNormalCourse | ( | ) |

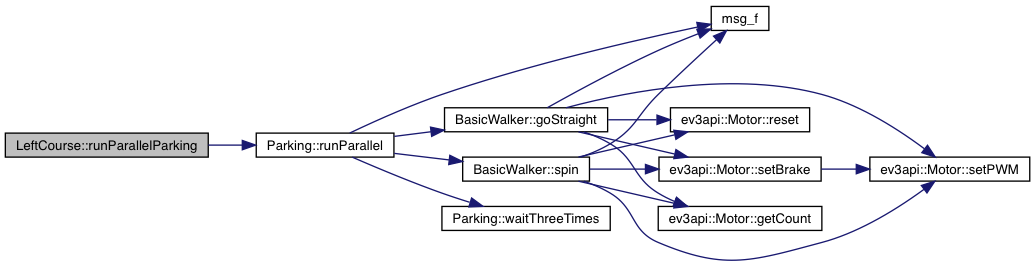
◆ runParallelParking()
| void LeftCourse::runParallelParking | ( | ) |

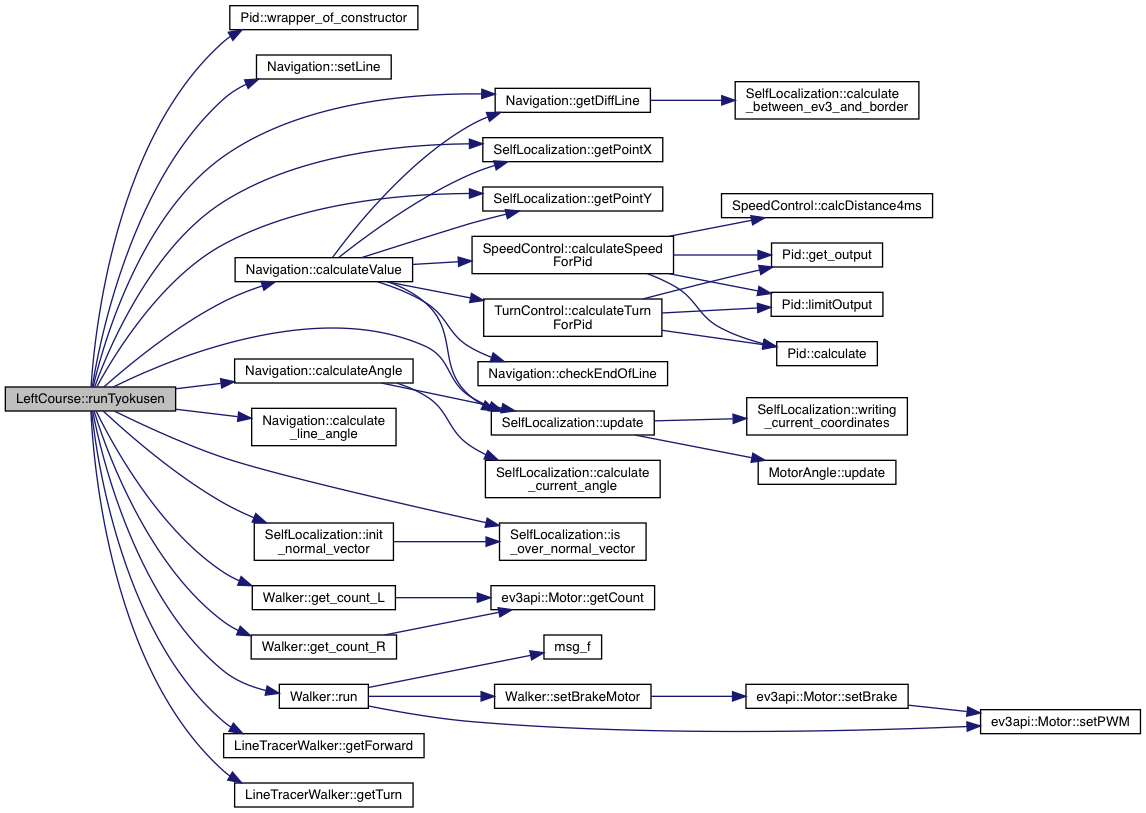
◆ runTyokusen()
| void LeftCourse::runTyokusen | ( | float | _start_x, |
| float | _start_y, | ||
| float | _goal_x, | ||
| float | _goal_y, | ||
| bool | _isBack | ||
| ) |
◆ setFirstCode()
| void LeftCourse::setFirstCode | ( | int32_t | code | ) |
このクラスのインスタンスを保持しているインスタンスまたはメンバ関数が、 UserInterfaceクラスのgetFirstCodeメンバ関数から 取得した初期位置コードを入力する。
- 引数
-
初期位置コード 0から99999まで
LeftCourse.cpp の 14 行目に定義があります。
被呼び出し関係図:

このクラス詳解は次のファイルから抽出されました:
- str/apps/include/LeftCourse.h
- str/apps/src/LeftCourse.cpp
