#include <TurnControl.h>
TurnControl の継承関係図
TurnControl 連携図
公開メンバ関数 | |
| TurnControl () | |
| std::int8_t | calculateTurnForPid (std::int8_t forward, std::int8_t light_value) |
 基底クラス Pid に属する継承公開メンバ関数 基底クラス Pid に属する継承公開メンバ関数 | |
| Pid (double p_gain, double i_gain, double d_gain, double target) | |
| void | setPid (double _p_gain, double _i_gain, double _d_gain, double _target) |
| void | wrapper_of_constructor (double _p_gain, double _i_gain, double _d_gain, double _diff, double _integral, double _target, double _output) |
その他の継承メンバ | |
| 基底クラス Pid に属する継承限定公開メンバ関数 | |
| void | calculate (double light_value) |
| double | get_output () |
| double | limitOutput (double pid_value) |
詳解
PID制御によるターン制御クラス
TurnControl.h の 15 行目に定義があります。
構築子と解体子
◆ TurnControl()
| TurnControl::TurnControl | ( | ) |
コンストラクタ
TurnControl.cpp の 9 行目に定義があります。
関数詳解
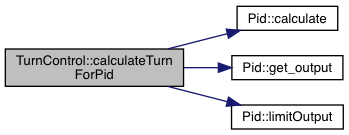
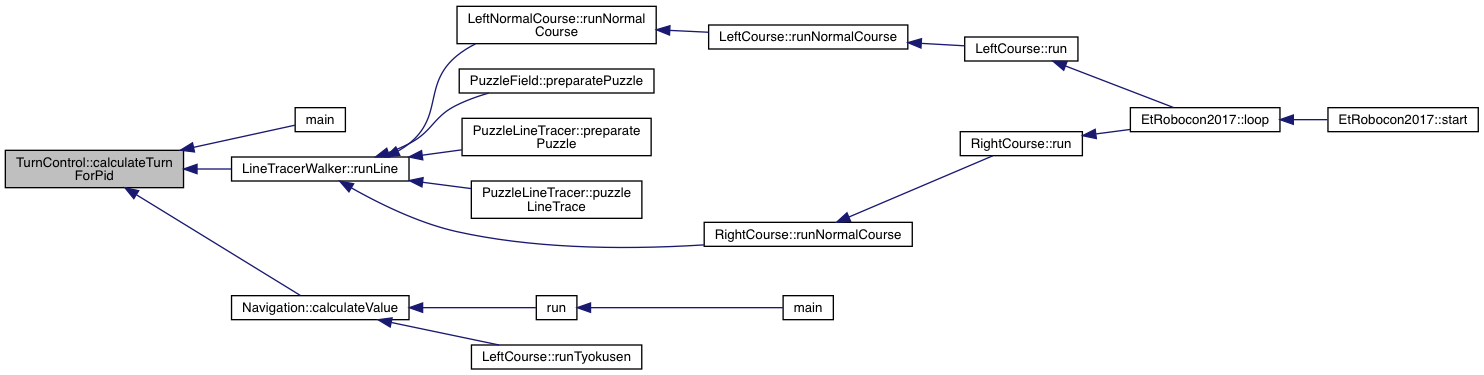
◆ calculateTurnForPid()
| std::int8_t TurnControl::calculateTurnForPid | ( | std::int8_t | forward, |
| std::int8_t | light_value | ||
| ) |
このクラス詳解は次のファイルから抽出されました:
- str/apps/include/TurnControl.h
- str/apps/src/TurnControl.cpp
