#include <GyroSensor.h>
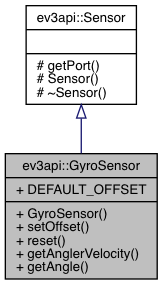
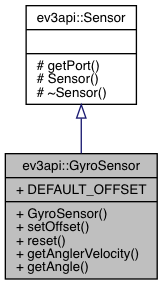
ジャイロセンサ
GyroSensor.h の 16 行目に定義があります。
◆ GyroSensor()
| GyroSensor::GyroSensor |
( |
ePortS |
port | ) |
|
|
explicit |
◆ getAngle()
| int16_t GyroSensor::getAngle |
( |
void |
| ) |
const |
◆ getAnglerVelocity()
| int16_t GyroSensor::getAnglerVelocity |
( |
void |
| ) |
const |
◆ reset()
| void GyroSensor::reset |
( |
void |
| ) |
|
◆ setOffset()
| void GyroSensor::setOffset |
( |
int16_t |
offset | ) |
|
角速度に対するオフセットを設定する
オフセット値 = 角速度 0[deg/sec] のときのセンサ値
- 引数
-
- 戻り値
- -
GyroSensor.cpp の 24 行目に定義があります。
◆ DEFAULT_OFFSET
| const int16_t ev3api::GyroSensor::DEFAULT_OFFSET = 0 |
|
static |
このクラス詳解は次のファイルから抽出されました:
 基底クラス ev3api::Sensor に属する継承限定公開メンバ関数
基底クラス ev3api::Sensor に属する継承限定公開メンバ関数



