#include <LeftNormalCourse.h>
LeftNormalCourse の継承関係図
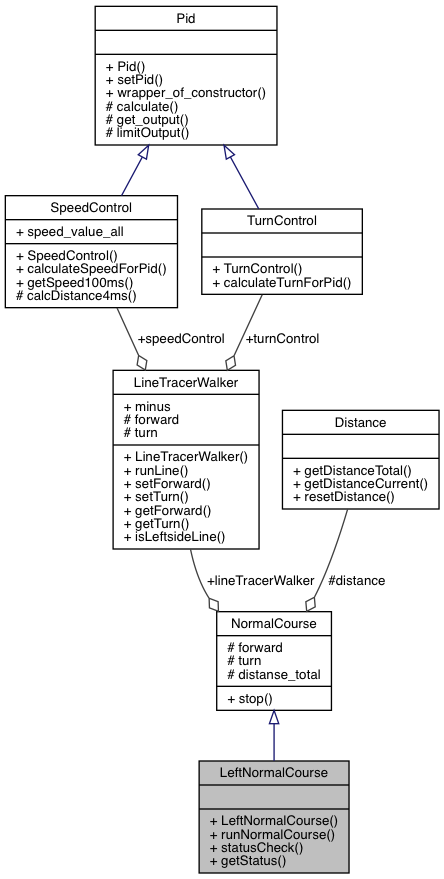
LeftNormalCourse 連携図
公開メンバ関数 | |
| LeftNormalCourse () | |
| bool | runNormalCourse (int32_t countL, int32_t countR, int8_t light_value) |
| bool | statusCheck (int32_t countL, int32_t countR) |
| int | getStatus () |
 基底クラス NormalCourse に属する継承公開メンバ関数 基底クラス NormalCourse に属する継承公開メンバ関数 | |
| void | stop () |
その他の継承メンバ | |
| 基底クラス NormalCourse に属する継承公開変数類 | |
| LineTracerWalker | lineTracerWalker |
| 基底クラス NormalCourse に属する継承限定公開変数類 | |
| Distance | distance |
| int8_t | forward |
| int8_t | turn |
| int32_t | distanse_total |
詳解
LコースのNormalCourseの処理を行うクラス
LeftNormalCourse.h の 30 行目に定義があります。
構築子と解体子
◆ LeftNormalCourse()
| LeftNormalCourse::LeftNormalCourse | ( | ) |

関数詳解
◆ getStatus()
| int LeftNormalCourse::getStatus | ( | ) |
◆ runNormalCourse()
| bool LeftNormalCourse::runNormalCourse | ( | int32_t | countL, |
| int32_t | countR, | ||
| int8_t | light_value | ||
| ) |

◆ statusCheck()
| bool LeftNormalCourse::statusCheck | ( | int32_t | countL, |
| int32_t | countR | ||
| ) |
現在の走行場所の状態を設定する
- 引数
-
[in] countL 左タイヤの回転角 [in] countR 右タイヤの回転角
- 戻り値
- 走行場所の状態が変わったかどうか
LeftNormalCourse.cpp の 77 行目に定義があります。
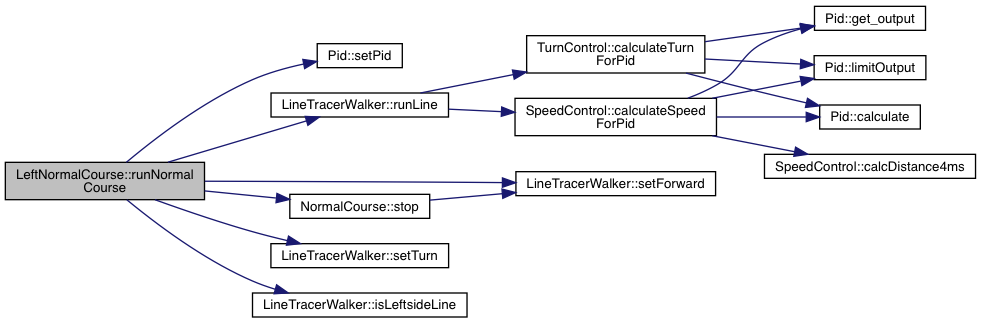
呼び出し関係図:

被呼び出し関係図:

このクラス詳解は次のファイルから抽出されました:
- str/apps/include/LeftNormalCourse.h
- str/apps/src/LeftNormalCourse.cpp
